UAVกลายเป็นหัวข้อข่าวเป็นครั้งคราวและเป็นที่ถกเถียงไม่ได้ว่าพวกเขามีแนวโน้มที่จะมีบทบาทสําคัญในยุคดิจิทัล คุณสามารถเลือกยานที่มีรูปร่างเฮลิคอปเตอร์ขนาดเล็กหรือเรียนรู้วิธีการสร้างเครื่องที่น่าตื่นเต้นเหล่านี้ เราขอแนะนําหลังเนื่องจากเรายังอยู่ในช่วงเริ่มต้นของเทคโนโลยีการปฏิวัตินี้และวิธีที่ดีที่สุดในการได้รับประโยชน์จากมันคือการทําความเข้าใจ
คนใช้UAVเพื่อวัตถุประสงค์ทางการค้าและเอกชนตลอดจนภารกิจทางทหารขั้นสูง ขณะนี้มีหลายประเภทของชุดUAVและUAV “พร้อมใช้งาน”ในตลาดที่เหมาะสําหรับงบประมาณและเป้าหมายทั้งหมด คู่มือนี้เกี่ยวกับการสร้างUAVตั้งแต่เครื่องมือที่จําเป็นในการสร้างUAVไปจนถึงวัสดุที่คุณจะใช้
เนื้อหา
เครื่องบินไร้คนขับคืออะไร?
2 .ประเภทของเครื่องบินบังคับ
3 .เครื่องมือพื้นฐานที่จําเป็นสําหรับการผลิตUAV
สิ่งที่จําเป็นในการทําUAV
วิธีการเลือกชิ้นส่วนUAVที่เหมาะสม
วิธีการสร้างเครื่องบินบังคับ
7. ความคิดสุดท้ายเกี่ยวกับวิธีการทํา uav
เครื่องบินไร้คนขับคืออะไร?
1.1คําจํากัดความของUAV
โดยพื้นฐานแล้ว UAV คือการบินหุ่นยนต์ผู้ใช้สามารถควบคุมระยะไกลผ่านตารางเที่ยวบินที่ใช้ซอฟต์แวร์ UAVเรียกว่าUAVหรือUAV
ในทศวรรษที่ผ่านมาUAVส่วนใหญ่ถูกนํามาใช้ในการปฏิบัติการทางทหารเช่นการป้องกันทางอากาศการสอดแนมและการกวาดล้างพื้นที่สงครามแบบเดิมๆ ปัจจุบันคนใช้UAVในกิจกรรมประจําวันต่างๆเช่นการค้นหาและช่วยเหลือการเฝ้าระวังการเฝ้าระวังการจราจรการเฝ้าระวังสภาพอากาศการดับเพลิงการถ่ายภาพและการถ่ายภาพการทําแผนที่ทางการเกษตรการต่อต้านการล่าสัตว์และแม้แต่บริการจัดส่ง
แม้ว่าUAVมีหลายวัตถุประสงค์แต่บทบาทหลักของพวกเขาคือการบินและการนําทาง ชอบเหรอแบตเตอรี่หรือติดตั้งเชื้อเพลิง แหล่งพลังงาน ใบพัด ใบพัด และกรอบลงบนเครื่องบินบังคับ เพื่อให้มันบินได้. กรอบประกอบด้วยวัสดุคอมโพสิตที่มีน้ําหนักเบาเพื่อลดน้ําหนักและเพิ่มความคล่องตัวในการบิน
โปรเซสเซอร์พึ่งพาตัวควบคุมการบินเพื่อเปิดตัวระยะไกลนําทางและเชื่อมโยงไปถึงได้อย่างปลอดภัย ตัวควบคุมเชื่อมต่อกับ uav ผ่านคลื่นความถี่วิทยุ รวมถึง wi-fi. ระบบนําทางเช่นจีพีเอสยึดติดกับหัวของUAVและแสดงตําแหน่งที่แน่นอนของUAVให้กับตัวควบคุม ถ้ามีเครื่องวัดความสูงในอากาศจะให้ข้อมูลความสูงและรักษาอุปกรณ์ไว้ที่ความสูงที่ระบุ
คุณยังสามารถติดตั้งที่แตกต่างกันได้เซ็นเซอร์เข้าไปในหุ่นยนต์ของคุณ เซ็นเซอร์วิสัยทัศน์ให้ข้อมูลแบบคงที่หรือวิดีโอ เซ็นเซอร์RGBรวบรวมความยาวคลื่นสีแดงสีเขียวและสีน้ําเงินที่มองเห็นได้ในขณะที่เซ็นเซอร์หลายสเปกตรัมให้ความยาวคลื่นที่มองเห็นได้และมองไม่เห็น
UAVบางตัวมีการตรวจจับอุปสรรคและเซ็นเซอร์ป้องกันการชน ในขั้นต้นวิศวกรวางตําแหน่งเซ็นเซอร์เหล่านี้เพื่อตรวจจับเฉพาะวัตถุที่อยู่ด้านหน้าของอุปกรณ์เท่านั้น ด้วยนวัตกรรมUAVสามารถระบุวัตถุได้ทุกทิศทาง:ด้านหน้าด้านหลังด้านล่างด้านบนและด้านซ้ายและด้านขวา
เพื่อที่จะลงจอดได้อย่างปลอดภัยUAVใช้ซอฟต์แวร์ตําแหน่งภาพที่มีกล้องลงและเซ็นเซอร์อัลตราโซนิค เซ็นเซอร์ตรวจจับว่าUAVอยู่ใกล้กับพื้นดินมากแค่ไหน
2 .ประเภทของเครื่องบินบังคับ
ตาม”วัตถุประสงค์”มีประเภทต่างๆของUAVเช่นการถ่ายภาพและการถ่ายภาพUAVการทําแผนที่อากาศUAVการเฝ้าระวังUAVและอื่นๆ อย่างไรก็ตามการจําแนกประเภทUAVที่ดีที่สุดขึ้นอยู่กับแพลตฟอร์มทางอากาศที่ใช้ ตามการจําแนกประเภทนี้มีสี่ประเภทหลักคือเฮลิคอปเตอร์ใบพัดใบพัดใบพัดใบพัดใบพัดใบพัดยานพาหนะไร้คนขับและรถแข่ง
2.1เฮลิคอปเตอร์โรเตอร์เดี่ยว
เฮลิคอปเตอร์โรเตอร์ประกอบด้วยโรเตอร์และโรเตอร์หางเพื่อปรับทิศทาง เฮลิคอปเตอร์เป็นเรื่องธรรมดาในด้านการบินไร้คนขับแต่ไม่ค่อยพบในอุตสาหกรรมUAV
เฮลิคอปเตอร์เดี่ยวมีประสิทธิภาพมากกว่าเฮลิคอปเตอร์หลายใบและสามารถใช้เครื่องยนต์แก๊สเพื่อขับเคลื่อนภารกิจระยะยาวได้ ในทางทฤษฎีใบพัดโรเตอร์มีขนาดใหญ่ขึ้นความเร็วในการหมุนจะช้าลงและมีประสิทธิภาพมากขึ้น ทฤษฎีนี้อธิบายว่าทําไมเครื่องบินสี่แกนมีประสิทธิภาพมากกว่าเครื่องบินแปดแกนและเครื่องบินสี่แกนระยะยาวมีรัศมีใบพัดขนาดใหญ่ เฮลิคอปเตอร์โรเตอร์เดี่ยวสามารถรองรับใบพัดยาวเช่นปีกหมุนเพื่อให้มีประสิทธิภาพสูง
ถ้าคุณวางแผนที่จะบินด้วยอุปกรณ์ที่มีเสถียรภาพหรือรวมกับอุปกรณ์ที่ยาวนานหรือก่อนหน้านี้เฮลิคอปเตอร์โรเตอร์เดียวคือสิ่งที่คุณต้องการ
ข้อเสียของเฮลิคอปเตอร์โรเตอร์เดี่ยวคือความซับซ้อนค่าใช้จ่ายการสั่นสะเทือนและความเปราะบางของใบมีดขนาดใหญ่ แม้ว่าใบพัดหลายใบจะทําให้ผู้ใช้มีรอยฟกช้ําแต่ก็ยากที่จะทําอะไรได้มากกว่านี้ เมื่อคุณข้ามขอบยาวและคมของเฮลิคอปเตอร์จะทิ้งความเสียหายที่รุนแรงขึ้น มีรายงานหลายกรณีโดยเฉพาะอย่างยิ่งจากเครื่องบินควบคุมระยะไกลและเฮลิคอปเตอร์ไร้คนขับ
เกี่ยวกับความซับซ้อนทางกลและการดําเนินงานการประเมินเฮลิคอปเตอร์โรเตอร์แบบโรเตอร์โดยทั่วไป พวกเขาสามารถบินได้ทันที ดังนั้นการเริ่มต้นที่ง่ายและก้าวหน้าครึ่งทางเป็นไปได้ อย่างไรก็ตามพวกเขาไม่เสถียรในกรณีที่เชื่อมโยงไปถึงอย่างไม่ถูกต้องและเนื่องจากความยากลําบากทางกลของพวกเขายังต้องการการบํารุงรักษาและการดูแลที่เหมาะสม
2.2 ยูเอสเอสหลายโรเตอร์

เฮลิคอปเตอร์หลายใบหรือเฮลิคอปเตอร์หลายใบมีใบพัดแบบคงที่ซึ่งได้รับการเคลื่อนไหวโดยการเปลี่ยนความเร็วสัมพัทธ์ของเครื่องยนต์ หลายโรเตอร์ที่ควบคุมด้วยวิทยุเป็นทางเลือกแรกสําหรับการถ่ายภาพทางอากาศและการสํารวจที่ดินเนื่องจากสามารถนิ่งในอากาศได้ ง่ายต่อการผลิตและพกพาและเป็นประเภทของUAVที่มีประสิทธิภาพมากที่สุด
หากคุณวางแผนที่จะติดตั้งกล้องขนาดเล็กเป็นระยะเวลาสั้นๆUAVหลายโรเตอร์เป็นทางเลือกที่ดีที่สุด ข้อเสียของพวกเขาคืออายุการใช้งานสั้นและเร็วไม่เหมาะสําหรับการทําแผนที่การบินขนาดใหญ่การตรวจสอบอย่างต่อเนื่องและการประเมินระยะทางไกลเช่นท่อและสายไฟ
แม้ว่าเทคโนโลยีจะดีขึ้นทุกปีหลายโรเตอร์มักไม่มีประสิทธิภาพและต้องใช้พลังงานมากในการต่อสู้กับแรงโน้มถ่วงและรักษาการบิน ด้วยพลังงานจากแบตเตอรี่มาตรฐานเครื่องบินหลายใบสามารถอยู่ในอากาศได้ประมาณ20ถึง30นาทีโดยมีกล้องเบา หลายโรเตอร์ที่บรรทุกหนักมีน้ําหนักมากขึ้นแต่เวลาบินสั้นลง
เนื่องจากความต้องการในการควบคุมที่รวดเร็วและแม่นยํามากขึ้นทําให้พวกเขามีเสถียรภาพมากขึ้นจึงไม่สามารถใช้เครื่องยนต์แก๊สเพื่อขับเคลื่อนพวกเขาได้ ดังนั้นพวกเขาจึงใช้มอเตอร์ไฟฟ้าเท่านั้น ก่อนที่นักพัฒนา จะคิดค้น พลังงานอื่น คาดว่าจะมีการเปลี่ยนแปลงเล็กน้อย ในเวลาเที่ยวบิน.
เราจําแนกใบพัดหลายใบขึ้นอยู่กับจํานวนเครื่องยนต์ที่ใช้ตัวอย่างเช่นเฮลิคอปเตอร์หลายใบสามใบเรียกว่าtri-copterและกําหนดค่าเป็นy 3 เหตุผลหลักในการตรึงปีกหลายใบคือการควบคุมตําแหน่งของUAVในอากาศได้ดียิ่งขึ้น ปีกโรเตอร์มากขึ้นทําให้UAVสามารถใช้งานได้ดีขึ้น
ในบทความนี้เราจะพูดถึงเฮลิคอปเตอร์สามแกน(สามโรเตอร์),เฮลิคอปเตอร์สี่แกน(สี่โรเตอร์),เฮลิคอปเตอร์หกแกน(หกโรเตอร์)และเฮลิคอปเตอร์แปดแกน(แปดโรเตอร์)
เฮลิคอปเตอร์สามตัว 3โรเตอร์ มากกว่าโรเตอร์
เฮลิคอปเตอร์ประกอบด้วยสามโรเตอร์ส่วนใหญ่เป็นรูป” y “หรือ” t “และแขนห่างกัน1200องศา สองใบพัดยึดติดกับปีกหน้าและหมุนไปในทิศทางต่างๆเพื่อชดเชยกันและกัน โรเตอร์ด้านหลังสามารถปรับได้ในทิศทางใดก็ได้ผ่านระบบเซอร์โวเพื่อสร้างกลไกการเบี่ยงเบน
เฮลิคอปเตอร์multi-rotor UAVเป็นเรื่องธรรมดาและมีราคาถูกเนื่องจากต้องใช้เพียงสามโรเตอร์และระบบเซอร์โวเพิ่มเติม อย่างไรก็ตามพวกเขาไม่ค่อยมีเสถียรภาพในชุดหลายโรเตอร์ พวกเขายังมีความเปราะบางเนื่องจากความเปิดกว้างของระบบเซอร์โวหางและโครงสร้างทางกลในการชนกัน
เฮลิคอปเตอร์สี่แกน 4 โรเตอร์ มากกว่าโรเตอร์
เครื่องบินสี่แกนประกอบด้วยสี่โรเตอร์ที่ยึดติดกับกรอบอสมมาตรซึ่งแยกออกจากกันเป็น900องศา สองโรเตอร์หมุนตามเข็มนาฬิกาในขณะที่อีกคนหนึ่งหมุนทวนเข็มนาฬิกาเพื่อสร้างแรงตรงข้าม เนื่องจากโครงสร้างทางกลที่เรียบง่ายเฮลิคอปเตอร์สี่ใบเป็นUAVหลายใบที่พบมากที่สุด
สี่แกนมีสองการกําหนดค่าหลักคือxและ+ การกําหนดค่าx-typeเป็นเรื่องปกติมากขึ้นเนื่องจากคุณสามารถยึดใบพัดห่างจากกล้องถ่ายรูปและถ่ายภาพได้ ในทางกลับกันการกําหนดค่าxค่อนข้างใช้งานง่ายและวนเวียนเหมือนเครื่องบิน
สุดท้ายรูปแบบh-typeช่วยให้สามารถติดตั้งกล้องที่ด้านหน้าของแร็คเพื่อหลีกเลี่ยงการวางใบพัดในมุมมองของกล้อง
เฮลิคอปเตอร์หก; 6 โรเตอร์ มากกว่าโรเตอร์
เฮลิคอปเตอร์หกแกนประกอบด้วยโรเตอร์หกตัวที่อยู่ห่างกันประมาณ60องศาในโครงสร้างอสมมาตรสามตัวตามเข็มนาฬิกาและสามตัวทวนเข็มนาฬิกา หกแกนมีความคล้ายคลึงกับเครื่องบินสี่แกนแต่พวกเขาได้รับแรงยกมากขึ้นด้วยเครื่องยนต์เพิ่มเติม พวกเขายังมีความซ้ําซ้อนที่ดีขึ้น หากโรเตอร์ล้มเหลวUAVสามารถรักษาเสถียรภาพและเชื่อมโยงไปถึงได้อย่างปลอดภัย ข้อเสียของพวกเขามักจะมีขนาดใหญ่และต้นทุนการก่อสร้างสูง
เฮลิคอปเตอร์รูปไข่; 8 โรเตอร์ มากกว่าโรเตอร์
เฮลิคอปเตอร์แปดแกนมีแปดโรเตอร์ในระนาบเดียวกันซึ่งสี่หมุนตามเข็มนาฬิกาและอีกสี่หมุนทวนเข็มนาฬิกา คล้ายกับเครื่องบินสี่แกนและหกแกน พวกเขาเป็นเพียงรุ่นอัพเกรดของเฮลิคอปเตอร์หกแกนยกและซ้ําซ้อนมากขึ้น
อย่างไรก็ตามเนื่องจากมีโรเตอร์มากขึ้นจึงใช้กระแสไฟฟ้ามากขึ้นและต้องใช้แบตเตอรี่มากขึ้น พวกเขามีราคาแพงเล็กน้อย คนส่วนใหญ่ใช้เครื่องบินแปดแกนสําหรับการถ่ายภาพทางอากาศและยกภาระหนัก
2.3 เครื่องบินบังคับ selfie

UAVส่วนใหญ่มีขนาดเล็กกว่าUAVอื่นๆและมีความชํานาญในภาพถ่ายและวิดีโอของตัวเอง แม้ว่าUAVอื่นๆจะมีชื่อเสียงในการถ่ายภาพและวิดีโอความละเอียดสูงในระยะไกลข้อดีหลักของUAV selfieคือน้ําหนักเบาขนาดเล็กและพกพาโดยไม่ให้สัมปทานต่อพลังงานและคุณภาพของภาพ การพกพาเป็นจุดขายของพวกเขาเนื่องจากผู้ใช้ส่วนใหญ่ต้องการUAVขนาดกระเป๋า
เมื่อคนคิดถึงUAVพวกเขาจะจินตนาการถึงอุปกรณ์ที่ทุกคนสามารถมองเห็นและได้ยินภายใน200เมตร จินตนาการนี้ไม่สามารถใช้กับUAV selfieได้เนื่องจากเป็นเครื่องขนาดเล็กที่เงียบสงบมองไม่เห็นและมีเสถียรภาพซึ่งมีข้อได้เปรียบที่คล้ายคลึงกับUAVอื่นๆ
UAV selfie มีฟังก์ชั่นเดียวกับ uav อื่น ๆ. คุณสามารถควบคุมได้โดยใช้รีโมทคอนโทรลหรือในบางกรณีใช้แอพพลิเคชันซอฟต์แวร์เพื่อควบคุมและวางไว้ในช่วงเวลาหนึ่งเพื่อถ่ายภาพและวิดีโอ
บางรุ่นมีGPSซึ่งจะกลับไปที่จุดเริ่มต้นโดยอัตโนมัติเมื่อไฟฟ้าไม่เพียงพอ พวกเขาบันทึกภาพไว้ในการ์ดหน่วยความจําที่เสียบไว้ บางคนสามารถอัปโหลดไปยังอินเทอร์เน็ตได้ตามเวลาจริง
UAV selfieช่วยให้ผู้ใช้สามารถถ่ายภาพได้ในสถานที่ที่ผู้คนไม่สามารถเข้าถึงได้ ตัวอย่างเช่นคุณสามารถวางUAVบนสะพานและถ่ายภาพถ่ายทางอากาศที่คุณเดินบนสะพาน
การใช้UAVในชีวิตประจําวันอีกอย่างหนึ่งคือเมื่อคุณต้องการปลดปล่อยมือหรือถ่ายรูปกับเพื่อนของคุณ โดยปกติแล้วคุณจะถูกจํากัดด้วยความสามารถในการจับก้านตัวเองและสิ่งที่คุณต้องการทําด้วยมือของคุณ UAV selfieสามารถบินได้ในทิศทางที่คุณต้องการ ดังนั้นในการถ่ายภาพตัวเองแบบรวมคุณสามารถมีเพื่อนจํานวนมากจากทุกมุมมอง
มีหลายประเภทของUAV selfieเช่นDJI Spark selfie UAV,drone x pro,JJRC h 37,Skye UAVและอื่นๆ
2.4 การแข่งรถไร้คนขับ

บรรดาผู้ที่คิดว่า วัตถุประสงค์เพียงอย่างเดียวของเครื่องบินบังคับ คือการถ่ายทําวิดีโอและรูปถ่าย ต้องคิดใหม่. การแข่งขันUAVจากมุมมองของบุคคลแรก( FPV )กําลังรากฐานอย่างรวดเร็วซึ่งเป็นหนึ่งในขบวนการทางเทคโนโลยีที่น่าตื่นเต้นที่สุด ข่าวดีก็คือมันเปิดให้ทุกคน
เราสามารถเปรียบเทียบการแข่งขันUAVกับวิดีโอเกมในชีวิตจริงได้ นักบินขับรถแข่งที่กําหนดเองด้วยUAVที่บินรอบๆแทร็กมืออาชีพที่มีอุปสรรคในทุกแกนด้วยความเร็วเกือบ100ไมล์ต่อชั่วโมง UAVติดตั้งกล้องด้านหน้าเพื่อถ่ายโอนภาพเรียลไทม์ไปยังแว่นตาFPV
การพัฒนาการแข่งขันUAVได้รับประโยชน์จากการรวมกันของความก้าวหน้าทางเทคโนโลยีต่างๆเช่นความสามารถในการติดตามสมาร์ทโฟนซอฟต์แวร์ซูเปอร์วิสัยทัศน์และความสมบูรณ์แบบของเทคโนโลยีกล้องและพลังงาน ความคืบหน้าเหล่านี้ได้ส่งเสริมความนิยมในการแข่งขันUAVอย่างมาก
ความนิยมอย่างรวดเร็วนี้ได้นําไปสู่การเพิ่มขึ้นของพันธมิตรและรูปแบบการแข่งขันUAVที่พยายามเปลี่ยนกิจกรรมสันทนาการนี้ให้กลายเป็นกีฬาที่แท้จริงโดยมีผู้สนับสนุนกฎการแข่งขันและคู่ค้ากระจายเสียง ด้วยการเปิดตัวสหภาพการแข่งขันUAV( DRL )สําหรับหลายๆคนการแข่งขันUAVกลายเป็นกิจกรรมที่สําคัญและเส้นทางการพัฒนาอาชีพ
มีความหลากหลายของUAVแข่งรถในตลาด พวกเขาทั้งหมดประกอบด้วยกรอบสี่โรเตอร์ตัวควบคุมความเร็วอิเล็กทรอนิกส์ตัวควบคุมการบินตัวส่งสัญญาณวิดีโอและตัวควบคุมเสาอากาศและกล้องในอากาศ ชิ้นส่วนอื่นที่นักบินต้องการคือแว่นตาFPV
3 .เครื่องมือพื้นฐานที่จําเป็นสําหรับการผลิตUAV
เครื่องมือพื้นฐานหมายถึงอุปกรณ์ที่จําเป็นบางอย่างที่จําเป็นสําหรับการผลิตUAV นอกจากนี้คุณจะใช้เครื่องมือเหล่านี้ส่วนใหญ่เพื่อซ่อมแซมUAVของคุณเพื่อป้องกันการชน เหล่านี้เป็นเครื่องมือขั้นพื้นฐานที่จําเป็นสําหรับการผลิตและซ่อมแซมUAV
นาฬิกา3หมื่น
มัลติมิเตอร์เป็นเครื่องมือที่จําเป็นสําหรับการผลิตUAV หน้าที่หลักของมัลติมิเตอร์คือการตรวจจับแรงดันไฟฟ้าของชิ้นส่วนไฟฟ้า นอกจากนี้คุณยังสามารถใช้เพื่อตรวจสอบความไม่ต่อเนื่องและการลัดวงจรที่เกิดจากการเชื่อมและตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่ มัลติมิเตอร์ขั้นสูงประกอบด้วยความสามารถในการวัดเพิ่มเติมเชื่อถือได้มากขึ้นและให้ผลลัพธ์ที่ถูกต้องมากขึ้น
3.2 เหล็กบด

พวกคุณต้องใช้ปืนเชื่อมเพื่อเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ชิ้น. นอกจากนี้คุณต้องตรึงชิ้นส่วนใดๆที่ถูกตัดการเชื่อมต่อเนื่องจากการชน นอกเหนือจากมัลติมิเตอร์แล้วเหล็กกล้าเป็นหนึ่งในเครื่องมือที่จําเป็นในการผลิตหรือซ่อมแซมUAV งานเชื่อมต่อทั้งหมดต้องใช้ปืนเชื่อม นอกจากนี้คุณยังสามารถใช้เพื่อสร้างรูปสี่เหลี่ยม
ความแตกต่างระหว่างเหล็กชุบและตารางเชื่อมคือการวัดอุณหภูมิ อุณหภูมิของเหล็กจะคงที่เสมอไปและอุณหภูมิของสถานีเชื่อมสามารถปรับได้ตามความหนาของเหล็กเชื่อม
3.3 เครื่องมือมือ
คุณจะต้องใช้เครื่องมือด้วยตนเองเพื่อถอดประกอบปรับเปลี่ยนและยึดส่วนประกอบของUAV โชคดีที่เครื่องมือเหล่านี้ส่วนใหญ่สามารถซื้อได้ง่ายในตลาด
ไขควงหกเหลี่ยม คุณจะใช้พวกเขาเพื่อยึดสกรูที่ยึดUAVเข้าด้วยกัน
ไดรฟ์น็อต / ประแจ. คุณจะต้องการมันเพื่อเปลี่ยนใบพัดและเอาน็อตออกจากชุดUAV
นังตัวแสบ. เมื่อใช้เครื่องมืออื่นๆคุณต้องใช้ครีบเพื่อสัมผัสจุดและยึดชิ้นส่วน คีมที่ใช้บ่อยที่สุดคือคีมแหลม
ลวดเหล็ก. คุณจะต้องปอกเปลือกและตัดสายไฟของพวกเขา
3.4 ไฟแช็ก / ปืนลมร้อน

คุณต้องใช้ความร้อนเพื่อควบแน่นการหดตัวของความร้อนรอบสายไฟ อุปกรณ์ที่ตรงที่สุดในตลาดคือไฟแช็ก-ไม่ว่าจะเป็นเครื่องจุดบุหรี่เคาน์เตอร์หรือไฟแช็กยาว นอกจากนี้คุณยังสามารถใช้ปืนลมร้อนขั้นสูงเพื่อสร้างความร้อนที่เชื่อถือได้
เทป3.5

คุณจะใช้กาวเพื่อครอบคลุมซิป เมื่อไม่มีวัสดุหดตัวที่เหมาะสมคุณต้องใช้กาวฉนวนเพื่อนําส่วนที่ครอบคลุมของช่องเปิด นอกจากนี้คุณยังสามารถใช้เพื่อกดสายไฟและสายเคเบิลได้ชั่วคราว
เทปสองด้านช่วยยึดเอสซีไว้ที่แขนจับตัวรับสัญญาณและติดตั้งไฟกระพริบเนื่องจากมีการทําให้หมาดๆการสั่นสะเทือนที่ดีเยี่ยม Kaptonเป็นเทปพิเศษที่ทนต่ออุณหภูมิสูงส่วนใหญ่ใช้เพื่อปกคลุมPCBระหว่างการเชื่อม
3.6 เสียบควัน
เมื่อคุณสร้างวงจรquaternionคุณไม่สามารถมั่นใจได้ว่าไม่มีการลัดวงจรในวงจร เมื่อคุณจ่ายไฟให้กับอุปกรณ์คุณต้องมีเครื่องป้องกันควันเพื่อป้องกันความเสียหายที่เกิดจากลัดวงจร หลอดไฟทําหน้าที่ฟิวส์; เมื่อกระแสไฟเพิ่มเติมไหลผ่านมัน มันจะเผาไหม้ เพื่อหลีกเลี่ยงความเสียหายใด ๆ.
3.7 ลูกเต๋า

คุณต้องใช้ลูกกลิ้งเพื่อยึดชิ้นส่วนอิเล็กทรอนิกส์ขนาดเล็กที่มีความไวไฟฟ้า พวกเขายังใช้สําหรับการทํางานของปุ่มที่ยากที่จะสัมผัส ลูกเต๋าเป็นประโยชน์มากสําหรับการผลิตUAV
สิ่งที่จําเป็นในการทําUAV
เทคโนโลยีช่วยลดความยุ่งยากในการผลิตUAVเป็นประวัติการณ์ ปัจจุบันคุณสามารถซื้อชุดUAVจากร้านค้าท้องถิ่นได้ ไม่ว่าคุณต้องการสร้างจากชุดUAVที่ประกอบขึ้นหรือจากสคริปต์เหล่านี้เป็นเครื่องมือที่คุณต้องการเพื่อให้กระบวนการสร้างUAVประสบความสําเร็จ
4.1 กรอบงาน

UAVของคุณต้องการกรอบเพื่อรองรับส่วนประกอบอื่นๆทั้งหมด เกี่ยวกับกรอบของ uav คุณมี 2 ทางเลือก. คุณสามารถสร้างจากจุดเริ่มต้นหรือซื้อจากร้านค้าที่ใกล้ที่สุด หากต้องการเรียนรู้เพิ่มเติมเกี่ยวกับกรอบต่างๆโปรดดูด้านล่างบทความเกี่ยวกับกรอบUAVที่ดีที่สุด.
การสร้างกรอบตั้งแต่เริ่มต้นไม่น่าท้าทายแต่คุณต้องเรียนรู้พื้นฐานด้านวิศวกรรมและเข้าใจวัสดุที่ถูกต้องเพื่อใช้ ตัวอย่างเช่นคุณสามารถใช้โลหะแสงพลาสติกหรือไม้กระดาน ถ้าคุณพอใจกับโครงไม้ ให้ใช้แผ่นไม้หนา 2.5 ซม.
4.2 มอเตอร์

UAVของคุณใช้มอเตอร์เพื่อหมุนใบพัด เครื่องบินสี่แกนใช้มอเตอร์สี่แกนในขณะที่เครื่องบินแปดแกนต้องใช้มอเตอร์แปดแกน ขอแนะนําให้ใช้มอเตอร์แบบไม่มีแปรงเนื่องจากแบตเตอรี่มีน้ําหนักเบา สําหรับผู้ที่ชื่นชอบUAV DIYที่ขาดความรู้ด้านวิศวกรรมที่ครอบคลุมซื้อมอเตอร์จากตัวแทนจําหน่ายที่เชื่อถือได้
เนื่องจากมอเตอร์จะเป็นตัวกําหนดการทํางานของUAVให้เลือกมอเตอร์ที่เหมาะสมสําหรับความสําเร็จของผลิตภัณฑ์ จะดีที่สุดถ้าคุณพิจารณาความยาวRPMและการใช้พลังงานที่ครอบคลุม
4.3ระบบควบคุมความเร็วอิเล็กทรอนิกส์( ESC )
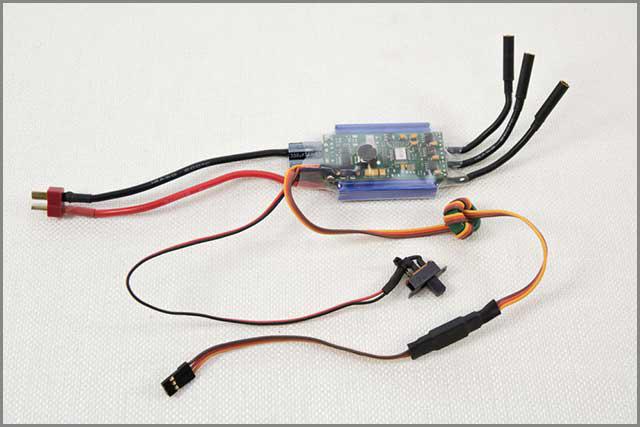
ระบบควบคุมการระงับอิเล็กทรอนิกส์เป็นวงจรอิเล็กทรอนิกส์ที่เปลี่ยนความเร็วและทิศทางของมอเตอร์ นอกจากนี้ยังสามารถใช้เป็นเบรคแบบไดนามิก ตัวควบคุมความเร็วอิเล็กทรอนิกส์จงใจแปลงพลังงานจากแบตเตอรี่DCเป็นกระแสไฟฟ้ากระแสสลับสามเฟสสําหรับมอเตอร์ไร้แปรง ดังนั้นหากคุณใช้มอเตอร์แบบไม่มีแปรงคุณต้องใช้ESCแต่คุณไม่จําเป็นต้องใช้มอเตอร์แบบแปรง
คุณควรใช้สายรัดหรือแผงจ่ายไฟเพื่อเชื่อมต่อตัวควบคุมความเร็วอิเล็กทรอนิกส์โดยตรงกับแหล่งจ่ายไฟ พวกเขามีวงจรกําจัดแบตเตอรี่ในตัว( BEC )เพื่ออํานวยความสะดวกในการจ่ายไฟให้กับส่วนประกอบอื่นๆเช่นแผงควบคุมการบินและเครื่องรับวิทยุ
คอนเน็กเตอร์ 4.4
คุณต้องใช้ขั้วต่อ3.5มม.เพื่อยึดมอเตอร์และระบบควบคุมเสถียรภาพอิเล็กทรอนิกส์และขั้วต่อ4.5มม.สําหรับแผงจ่ายไฟ
4.5 ตัวควบคุมการบิน

นี่แผงควบคุมการบินทําหน้าที่เป็น”สมอง”ของเครื่องบินบังคับ ประกอบด้วยเซ็นเซอร์เช่นไจโรและเครื่องวัดความเร่งที่กําหนดความเร็วของมอเตอร์ ตัวควบคุมการบินมีขนาดและรูปร่างต่างๆ
4.6 ใบพัด

เครื่องสี่แกนต้องใช้ใบพัดสี่ใบ สองใบพัดหมุนตามเข็มนาฬิกาและอีกสองใบหมุนทวนเข็มนาฬิกา ใบพัดขับเคลื่อนมีตัวอักษร “r” หลังขนาด. เมื่อเลือกใบพัดให้เลือกกรอบที่เหมาะกับคุณ ใส่ใจกับวัสดุอย่างใกล้ชิด-ใบพัดไม้ไม่สามารถใช้งานได้แต่คุณต้องแน่ใจว่าคุณเลือกที่เหมาะสมมาก
4.7 แบตเตอรี่และแผงจ่ายไฟ
พวกเขาจะทําหน้าที่เป็นแหล่งจ่ายไฟสําหรับอุปกรณ์ของคุณ แผงควบคุมจะเชื่อมต่อระบบควบคุมการระงับอิเล็กทรอนิกส์กับแบตเตอรี่เพื่อให้แน่ใจว่ามีกระแสไฟฟ้าเพียงพอ นอกจากนี้ยังจําเป็นต้องมีหน่วยตรวจสอบแบตเตอรี่เพื่อส่งต่อแหล่งจ่ายไฟจากUAVไปยังตัวควบคุม
เมื่อซื้อแบตเตอรี่สําหรับUAVให้พิจารณาความจุและชนิดของแบตเตอรี่ แบตเตอรี่ลิเธียมเป็นแบตเตอรี่ที่ดีที่สุดสําหรับUAV
4.8แผ่นติดตั้ง
จะช่วยลดการสั่นสะเทือนของUAVและบรรลุเสถียรภาพทางอากาศ ถ้าคุณวางแผนที่จะติดตั้งกล้องบนเครื่องบินบังคับคุณต้องมีเบาะติดตั้ง
วิธีการเลือกชิ้นส่วนUAVที่เหมาะสม
ขั้นตอนการเลือกชิ้นส่วนที่เหมาะสมสําหรับUAVต้องใช้การรวมกันของศิลปะและวิทยาศาสตร์ เกณฑ์หลักที่คุณควรพิจารณาคือการผลักดันอัตราส่วนน้ําหนักหรือที่เรียกว่าสูตรTW
เราทุกคนรู้ว่าน้ําหนักเป็นแรงดึงแรงโน้มถ่วงลงสู่พื้นดิน UAVมีมวลและสามารถบินได้เฉพาะเมื่อสร้างแรงผลักดันขึ้นเกินน้ําหนักของตัวเอง ดังนั้น tw 2 หมายความว่าแรงขึ้นที่บังคับใช้โดย uav เป็นสองเท่าของน้ําหนัก.
ตามวัตถุประสงค์ของUAVเลือกอัตราส่วนTWที่แตกต่างกัน เมื่อต้องการทําเช่นนี้คุณควรตั้งค่าอัตราส่วนเป้าหมายTWก่อนที่จะเริ่มผลิตUAVเพื่อประกอบชิ้นส่วนตามอัตราส่วนดังกล่าว ตัวอย่างเช่นถ้าคุณวางแผนที่จะสร้างUAVการแข่งรถFPVที่ดีคุณควรเลือกอัตราส่วนTWสูงกว่า4 ถ้าคุณวางแผนที่จะสร้างUAVที่สามารถบรรทุกสิ่งหนักได้ให้พิจารณาอัตราส่วนTWประมาณ2
5.1วิธีการประมาณอัตราส่วนTW
เพื่อหาอัตราส่วนน้ําหนักของการผลักดันคุณควรเริ่มต้นด้วยการกําหนดน้ําหนักของUAV คุณต้องตรวจสอบรายการชิ้นส่วนและคํานวณน้ําหนักของชิ้นส่วนทั้งหมด สมมติว่าน้ําหนักโดยประมาณของเครื่องบินบังคับที่คุณวางแผนจะผลิตคือ2,000กรัม ถ้าอัตราส่วนน้ําหนักผลักเป้าหมายของคุณคือ2ซึ่งหมายความว่าคุณต้องการแรงผลักดัน4000กรัม สําหรับยูเอ็นออคโตคอปเตอร์ แรงผลักดันต่อเครื่องยนต์ อาจจะ 500 กรัม.
การหาแรงผลักดันของมอเตอร์เป็นงานของแรงดันแบตเตอรี่ขนาดใบพัดและขนาดมอเตอร์ คุณลักษณะเหล่านี้กําหนดแรงผลักดันที่สร้างขึ้นโดยเครื่องยนต์
ขอแนะนําให้ใช้มอเตอร์ที่ผลิตโดยผู้ผลิตที่ให้เครื่องวัดแรงดัน ตารางเหล่านี้มีข้อมูลจริงที่แสดงจํานวนกรัมที่คุณต้องการในสถานการณ์ที่แตกต่างกัน
วิธีการสร้างเครื่องบินบังคับ
ตอนนี้คุณมีวัสดุทั้งหมดที่จําเป็นในการทําUAVได้ถึงเวลาที่จะรวมกัน ทําสี่แกนตามขั้นตอนง่ายๆ7ขั้นตอนต่อไปนี้:
6.1สร้างกรอบ
คุณสามารถใช้วัสดุที่คุณเลือกเพื่อสร้างกรอบ อย่างไรก็ตามเลือกเฉพาะวัสดุที่มีโครงสร้างและรูปร่างที่ดีเช่นไม้พลาสติกหรือโลหะ ถ้าคุณเลือกไม้ให้ใช้แผ่นไม้ที่มีความยาวมากกว่า60ซม.และกว้างประมาณ30ซม. แบ่งออกเป็นสองครึ่งยาว 60 ซม. และหนา 30 ซม. คุณต้องใช้แถบทั้งสองนี้เพื่อทํากรอบรูปสี่เหลี่ยม
ในการสร้างการกําหนดค่าx-typeคุณต้องข้ามแถบ นอกจากนี้คุณยังต้องการแผ่นไม้เพื่อสร้างและเชื่อมต่อส่วนสี่เหลี่ยมตรงกลางของกรอบ บล็อกสี่เหลี่ยมผืนผ้าควรมีความหนา6×15ซม.และ2มิลลิเมตร
UAVที่แตกต่างกันต้องมีขนาดที่แตกต่างกัน ดังนั้นคุณสามารถปรับเปลี่ยนขนาดของUAVได้ตามต้องการ คุณต้องใช้สกรูและกาวเพื่อประกอบกรอบของคุณ ถ้าคุณเลือกวัสดุโลหะหรือพลาสติกขนาดจะเหมือนกัน ความแตกต่างเพียงอย่างเดียวคือการเชื่อมต่อแถบ
6.2ประกอบเครื่องยนต์UAV
เจาะมอเตอร์บนเฟรมตามระยะห่างระหว่างรูสกรู ขอแนะนําให้เจาะรูเพิ่มเติมเพื่อให้คลิปและเพลาของอุปกรณ์สามารถเคลื่อนย้ายได้อย่างอิสระ
ยึดเข้ากับกรอบด้วยสกรูและไขควง
ถ้าคุณสร้างUAVจากชุดคุณต้องยึดเครื่องยนต์ไว้กับชุดเท่านั้น ซื้อมอเตอร์จากตัวแทนจําหน่ายที่ได้รับอนุญาตเพื่อความน่าเชื่อถือและเสถียรภาพ
6.3ติดตั้งตัวควบคุมความเร็วอิเล็กทรอนิกส์( ESC )
หลังจากประกอบมอเตอร์แล้วคุณต้องติดตั้งระบบควบคุมเสถียรภาพทางอิเล็กทรอนิกส์ที่ด้านล่างของโครงUAV กลยุทธ์นี้มีพื้นที่เพียงพอสําหรับส่วนอื่นๆที่ด้านบน ขอแนะนําให้ใช้ซิปเพื่อติดตั้งระบบควบคุมเสถียรภาพทางอิเล็กทรอนิกส์อย่างแน่นหนาบนกรอบของUAV
วางแผงESCและแผงกระจายบนด้านบนของกรอบและตัดสายไฟเพื่อให้ตรงกับวงจรบนแผง นี่แผงวงจรมีสองวงจร วงแหวนสีแดง คือวงจรที่คุณจะเชื่อมต่อกับลวดสีแดงทั้งหมด และวงแหวนสีดํา คือวงจรที่คุณจะเชื่อมกับลวดสีดําทั้งหมด.
ก่อนที่จะเชื่อมให้เคลือบผิวที่จุดเชื่อมต่อทั้งหมด หลังจากนั้น, บนสายไฟ. การชุบดีบุกคือกระบวนการเคลือบลวดด้วยปืนเชื่อมเพื่อเชื่อมต่อกับรอยเชื่อมบนแผง
ตอนนี้เชื่อมตัวควบคุมความเร็วอิเล็กทรอนิกส์กับแผงกระจาย ทิ้งปืนเชื่อมไว้ที่จุดเชื่อมต่อจนกว่าสายไฟจะสามารถหลอมเหลวได้ หลังจากนั้นให้วางลวดไว้บนลิงค์และถือกระบอกสูบจนกระทั่งการเชื่อมทั้งหมดละลาย
ดึงในทิศทางที่แตกต่างกันเพื่อให้แน่ใจว่าการเชื่อมต่อของคุณแข็งแรง เสียงระเบิดหมายความว่าคุณมี”จุดเชื่อมเย็น”และคุณต้องเชื่อมต่อการเชื่อมต่อของคุณอีกครั้ง
6.4กรงเชื่อมโยงไปถึงคงที่
ในขั้นตอนนี้คุณจะต้องยึดเฟรมเชื่อมโยงไปถึงของUAVเพื่อดูดซับการสั่นสะเทือนเมื่อเชื่อมโยงไปถึงพื้นผิวที่ขรุขระ คุณสามารถใช้วิธีการต่างๆในการสร้างกรอบเชื่อมโยงไปถึง ดังนั้นคุณควรใช้ความคิดสร้างสรรค์ของคุณเพื่อสร้างกรอบเชื่อมโยงไปถึงที่ไม่ซ้ํากัน
เชือกเชื่อมโยงไปถึงที่พร้อมใช้งานเช่นปลิงเป็นเรื่องง่ายและง่ายต่อการซ่อมแซม คุณไม่จําเป็นต้องแก้ไขเครื่องมือของคุณเชื่อมต่อกับกรอบของคุณและยึดแน่นด้วยเทป เพื่อถอดออกคุณต้องถอดเทปออก
6.5ติดตั้งตัวควบคุมการบิน
ติดตั้งตัวควบคุมการบินให้กับUAVของคุณเพื่อให้มีเสถียรภาพระหว่างการบิน ตรวจสอบให้แน่ใจว่าแปะฟองน้ําไว้ใต้ตัวควบคุมเพื่อลดการสั่นสะเทือนที่เกิดจากUAV ตรวจสอบให้แน่ใจว่าลูกศรของตัวควบคุมการบินชี้ไปที่ทิศทางของกรอบ
ยึดตัวควบคุมการบินเข้ากับโครงร่างรูเพื่อให้ตรงกับวงเล็บ หลังจากนั้นให้ขันน็อตให้แน่น
มีหลายวิธีในการติดตั้งตัวควบคุมการบิน ตัวอย่างเช่นคุณสามารถติดตั้งได้ในทิศทางที่คุณต้องการเหนือกรอบแต่คุณต้องตรวจสอบให้แน่ใจว่าส่วนประกอบทั้งหมดได้รับการแก้ไขอย่างถูกต้องก่อนที่จะสอบเทียบUAVของคุณ นอกจากนี้คุณยังสามารถใช้ซิปเพื่อเชื่อมต่อตัวควบคุมการบินของคุณ
6.6เชื่อมต่อซอฟต์แวร์LibrePilotกับUAVของคุณ
ซอฟต์แวร์นี้จะช่วยให้คุณควบคุมและทดสอบUAVได้ คุณต้องเชื่อมต่อระบบควบคุมเสถียรภาพทางอิเล็กทรอนิกส์กับตัวควบคุมการบินและเชื่อมต่อUAVกับรีโมทคอนโทรลก่อน
6.7 ทดสอบยานบังคับของคุณ
ตอนนี้คุณได้ซ่อมแซมส่วนต่างๆของUAVของคุณแล้วให้ใช้มันเป็นวงกลมก่อนที่จะใช้มันอย่างเป็นทางการ ทดสอบUAVของคุณในที่เปิดโล่งห่างจากอาคารต้นไม้เครื่องบินและฝูงชนเพื่อหลีกเลี่ยงการบาดเจ็บและความเสียหาย
หลายด้านที่คุณควรพิจารณาในระหว่างการทดสอบ ขั้นแรกคุณควรประเมินว่าUAVของคุณสามารถควบคุมได้ง่ายและบินได้ดีโดยไม่ต้องล่องลอย คํานึงถึงความปลอดภัยของอุปกรณ์ของคุณตรวจสอบให้แน่ใจว่าสามารถล็อคGPSได้อย่างถูกต้องและกลับไปที่หน้าแรกได้
7. ความคิดสุดท้ายเกี่ยวกับวิธีการทํา uav
เราได้กําหนดว่าUAVคืออะไรและได้กล่าวถึงสี่ประเภทหลักของUAVได้แก่เฮลิคอปเตอร์ใบพัดใบพัดใบพัดใบพัดใบพัดใบพัดและยานพาหนะการแข่งรถ เราได้พูดคุยเกี่ยวกับUAVที่อยู่ในหมวดหมู่เหล่านี้ เครื่องมือพื้นฐานที่คุณต้องการคือมัลติมิเตอร์,ปืนเชื่อม,เครื่องมือมือ,ปืนความร้อน,เทป,ปลั๊กควันและคีม นอกจากนี้เรายังกล่าวว่าส่วนประกอบหลักของUAVคือเฟรมมอเตอร์หน่วยควบคุมความเร็วอิเล็กทรอนิกส์( ESCs )ขั้วต่อแหล่งจ่ายไฟและแผ่นติดตั้ง
เราเน้นขั้นตอนหลักเจ็ดขั้นตอนในการสร้างUAV นอกเหนือจากขั้นตอนที่กล่าวถึงในบทความนี้แล้วยังมีขั้นตอนกลางอื่นๆเนื่องจากความหลากหลายของUAVชิ้นส่วนโปรแกรมและเครื่องมือ อย่างไรก็ตามคู่มือนี้มีความรู้และเคล็ดลับที่ใช้กับโมเดลใดๆ เราหวังว่าเราได้ปลูกฝังความเชื่อมั่นที่คุณต้องการในกระบวนการทําUAV
