เนื้อหา
การปรับความกว้างพัลส์( PWM )คืออะไร?
เอาท์พุทPWMคืออะไร?
ระยะเวลาการทํางาน
ความถี่ของสัญญาณ pwm
แอพพลิเคชัน pwm
เทคโนโลยีการมอดูเลตความกว้างพัลส์
ฟังก์ชัน pwm
วิธีการใช้เทคโนโลยีPWM?
สรุป
การปรับความกว้างพัลส์( PWM )คืออะไร?
เอาท์พุทPWMคืออะไร?
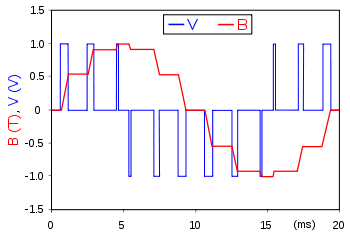
ตัวอย่างPWMในการเหนี่ยวนํา
ระยะเวลาการทํางาน
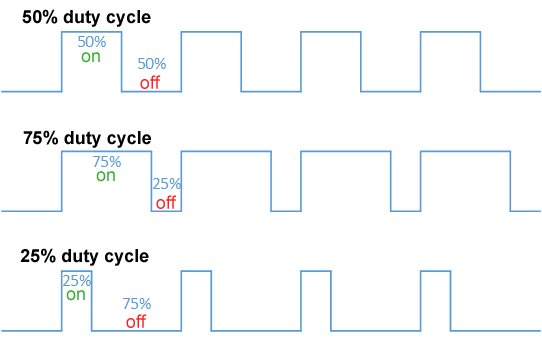
ไอคอนของอัตราส่วนการทํางาน
อัตราการทํางาน50 %แสดงว่าสัญญาณเอาท์พุทดิจิตอลอยู่ในระดับต่ํากว่าระดับสูง ตรงกันข้ามเป็นสิ่งสําคัญสําหรับอัตราการใช้งานมากกว่า50 %
อย่างไรก็ตามสัญญาณใช้เวลาครึ่งหนึ่งเพื่อปิดและอีกครึ่งหนึ่งเพื่อเปิดส่งผลให้มีอัตราการทํางาน50 % นอกจากนี้ยังกลายเป็นเทียบเท่ากับคลื่นชีพจรคลื่นสี่เหลี่ยมที่เหมาะ
สุดท้ายอัตราส่วนการทํางาน0 %อธิบายสัญญาณการต่อสายดิน/ปิดขณะที่อัตราส่วนการทํางาน100 %อธิบายช่วงเต็มของสัญญาณ
ความถี่ของสัญญาณ pwm
แอพพลิเคชัน pwm
สร้างสัญญาณเสียง
ปรับความสว่างของแสงที่ปล่อยออกมาจากแหล่งกําเนิดแสง
ส่วนประกอบความร้อน
อุปกรณ์สวิทช์
ตัวควบคุมแรงดันไฟฟ้าที่เหมาะสมและไม่มีประสิทธิภาพ

(ตัวควบคุมแรงดันไฟฟ้าและตัวควบคุมความเร็วPWM )
โดยระบบการสื่อสารที่เข้ารหัสข้อความ,
การควบคุมมอเตอร์เซอร์โว(โหลดเฉื่อย),
เตาไฟฟ้า,
ไดรฟ์เสียงดังที่แตกต่างกันและ
ให้ผลลัพธ์การจําลอง
เทคโนโลยีการมอดูเลตความกว้างพัลส์
ฟังก์ชัน pwm
วิธีการใช้เทคโนโลยีPWM?
การปรับความกว้างพัลส์ของทรานซิสเตอร์
วัสดุที่จําเป็น
ความต้านทาน 22k,
หม้อ 10k,
ทรานซิสเตอร์ bc338 และ bc557,
ตัวต้านทาน 220 โอห์ม,
ตัวต้านทาน 47 โอห์ม และ
ตัวเก็บประจุ 100 ไมโครฟาไรซ์ 60 v.
แผนผังวงจร

แผนผังทรานซิสเตอร์PWM
การควบคุมความเร็ว
หมายเหตุ:
บอร์ดไดรเวอร์ i2c pwm
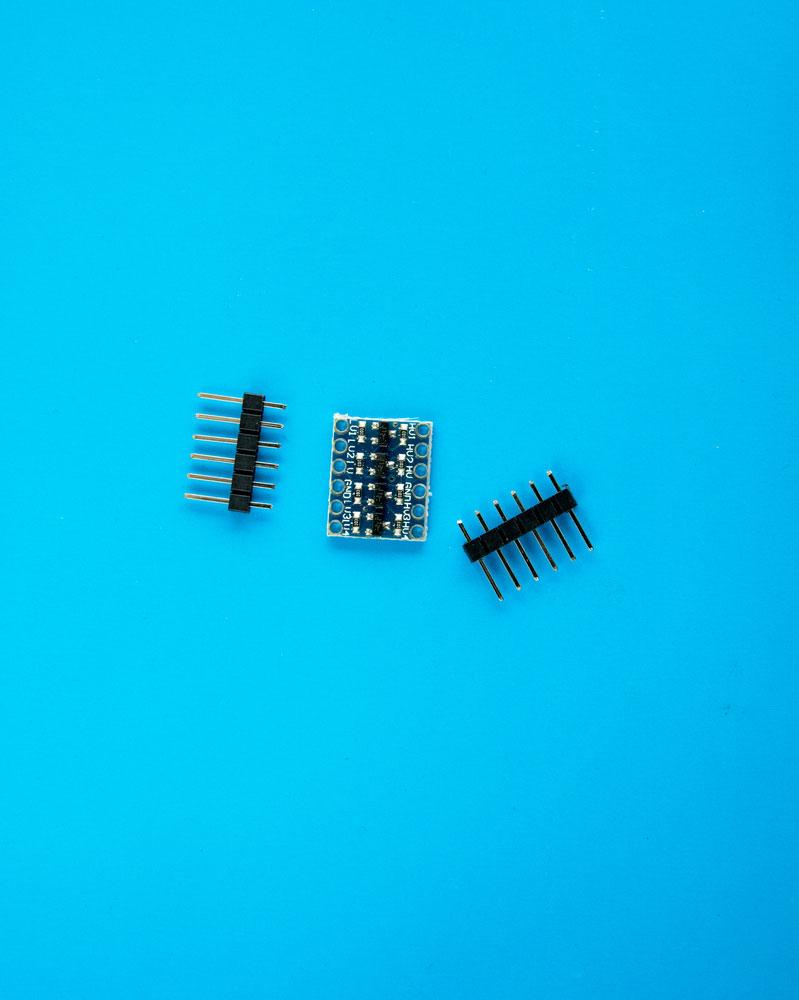
(ชิประดับตรรกะ i2c สี่ช่องสื่อสาร )
มีสัญญาณนาฬิกาในตัวซึ่งหมายความว่าสามารถทํางานได้อย่างอิสระโดยไม่ต้องป้อนสัญญาณอย่างต่อเนื่องผ่านไมโครคอนโทรลเลอร์
ประการที่สองมีการรั่วไหลที่กําหนดค่าได้หรือผลลัพธ์ผลักดัน
จากนั้นคุณสามารถปรับความถี่PWNประมาณ1.6 kHzในi2c
นอกจากนี้ยังเป็นไปตามมาตรฐาน5 v กล่าวอีกนัยหนึ่งคุณสามารถปรับใช้ไมโครคอนโทรลเลอร์3.3 vในขณะที่ขับเคลื่อนเอาต์พุตได้ถึง6 vอย่างระมัดระวัง
ประการที่ห้าเอาท์พุทเพื่อให้แน่ใจว่าพินปิดใช้งานเอาต์พุตทั้งหมด
นอกจากนี้ยังเป็นไปตามมาตรฐานRoHS
มีขาที่อยู่6ขา ดังนั้นคุณสามารถเชื่อมต่อได้ประมาณ62จุดย่อยบนบัสI2c
สุดท้ายแหล่งจ่ายไฟแต่ละเอาท์พุทมีความละเอียด12บิต ตัวอย่างเช่นเมื่อใช้เซอร์โวระบบจะหมายถึงอัตราการอัพเดตความละเอียด4 usที่60 Hz
กําลังไฟสัญญาณ led ( สีเขียว ),

( led pwm pcb สีเขียว )
การออกแบบที่เชื่อมโยงได้
ขั้วต่อขาเข้าพลังงาน,
ที่อยู่ของขาเชื่อมจัมเปอร์,
มีตําแหน่งตัวเก็บประจุขนาดใหญ่ในสาย v+ ถ้าจําเป็น,
ความต้านทานต่อเนื่อง220โอห์มในสายส่งออกทั้งหมด
อินพุตแผงเทอร์มินัลมีการป้องกันขั้วต่อต้านขั้ว,
สี่คอนเน็กเตอร์แบบ3พินที่ช่วยให้สามารถใช้งานเซิร์ฟเวอร์ได้ถึง16ระบบในแต่ละครั้ง
ตัวควบคุมชาร์จ arduino pwm
ส่วนประกอบที่จําเป็น
โมสเฟตเช่น irf540,
ความต้านทาน10,4,7,1,000และ330โอห์ม,
100 uf , ตัวเก็บประจุ 35 v,
transistor – 2n 3904 หรือเทียบเท่ากับ transistor NPN,
กระดานทดลอง
จอมอนิเตอร์LCDแบบอักขระ16×2ตัว
ไดโอดเปล่งแสงสีแดงและสีเขียว
zener ไดโอด 11v – 1n 4741a,
ไดโอด – in 4007,
อาร์ดุยโน่ ยูโน่,
ขั้วต่อสกรูหมุด,
จัมเปอร์.
แผ่นเจาะรู
ฟิวส์5 aและที่นั่งฟิวส์
กล่องรายการ,
สก็อตแลนด์ติดตั้งพลาซ่า

แผนผังวงจรควบคุมการชาร์จของArduino PWM
ไฟฟ้าจากแผงเซลล์แสงอาทิตย์ผ่านd 1เข้าสู่วงจร
จากนั้นไดโอดziner d 2จะจํากัดแรงดันไฟฟ้าใดๆที่อินพุต
ตัวเก็บประจุc 1ช่วยลดจุดสูงสุดหรือเสียงรบกวนที่ไม่จําเป็นในขณะที่ตัวแบ่งแรงดันไฟฟ้าr 2และr 1ตรวจจับแรงดันไฟฟ้าของแผงเซลล์แสงอาทิตย์
ถัดไปพินอะนาล็อกArduino AO (ขาเอาต์พุต)จะได้รับเอาต์พุตของตัวแบ่งแรงดันไฟฟ้า
พินArduino 6จะปล่อยสัญญาณPWMเพื่อเปิดMOSFET ( q1) จากนั้นทรานซิสเตอร์ความต้านทานr 4และt 1จะขับเคลื่อนMOSFET q 1
r 3ใช้เป็นความต้านทานแรงดึงของประตูวงจร
ตอนนี้MOSFETเปิดอยู่กระบวนการชาร์จจะเริ่มขึ้นเนื่องจากแหล่งจ่ายไฟเข้าสู่แบตเตอรี่
r 5และr 6ในวงจรแยกแรงดันไฟฟ้าที่สองตรวจสอบแรงดันไฟฟ้าของแบตเตอรี่ ต่อมาArduinoอนาล็อกพินa 1จะได้รับเอาท์พุทของตัวแบ่งแรงดันไฟฟ้า
t 2ทรานซิสเตอร์q 2 MOSFETขณะที่q 2ไดรฟ์โหลด นอกจากนี้คุณยังสามารถใช้รีเลย์แทนq 2
ฟิวส์f 2และf 1มีกลไกการป้องกันกระแสไฟเกิน
led 2 (สีเขียว)และled 1สีแดงทําหน้าที่เป็นตัวบ่งชี้และคุณสามารถเชื่อมต่อกับพิน8และพิน7ของArduino
